Be part of the future with us!
Register now for our online product launch event on May 23rd.



Get Access to NanoAvionics Product Catalog with Tech Specs
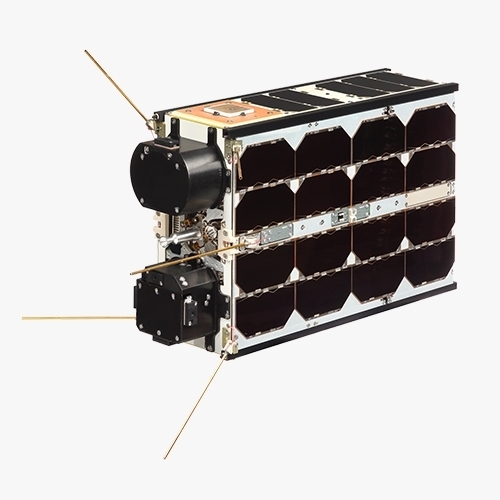
Today’s 6U CubeSats are high-performance, reliable, and versatile systems that are unlocking a wealth of new capabilities for forward-thinking mission designers. Such innovation requires a stable, proven, and user-friendly platform in order to maximize value creation in orbit. The NanoAvionics M6P nanosatellite bus has three standard performance configurations – Light, Mid and Max – that have been specifically designed to meet these criteria, while ensuring a significant amount of available payload space, and is equally well-suited for single-satellite missions or constellations.
The M6P’s onboard systems are flight-proven and are pre-configured, to simplify and speed up integration. This allows you to focus more time and effort on higher-level mission tasks, such as optimizing payload performance or testing new services.
By applying modern industrial processes and concepts we develop standardized modular satellite buses that are more reliable and cost-effective to integrate than custom-built alternatives. Our M6P multi-purpose systems also meet the requirements of a wide range of applications including:
All critical systems onboard, including the flight computer, payload controller, electrical power system (EPS), and communication systems, utilize radiation-tolerant components. The hardware layout maximizes payload volume while ensuring robust power functionality, reliability, and precise thermal control for sensitive payloads, such as measurement and sensing instruments.
The bus also has a decentralized data system that enables fast data rates and an optional high-impulse propulsion unit can also be included, so that mission objectives and timelines can be extended or adjusted if required.

Get Access to NanoAvionics Product Catalog with Tech Specs
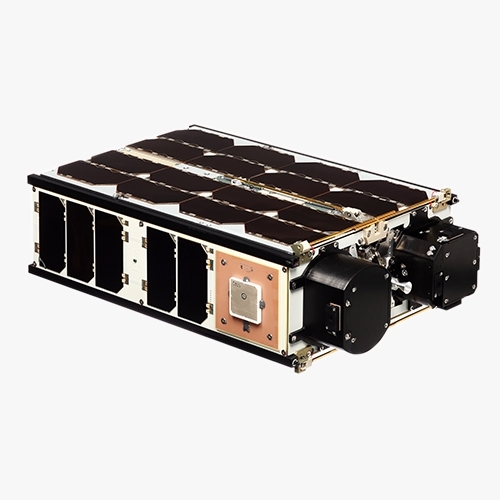
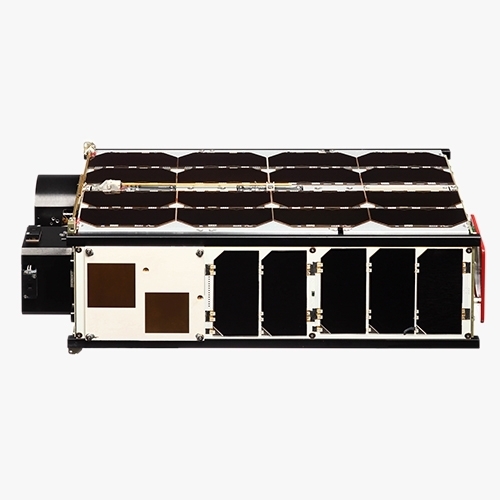
Today’s 6U CubeSats are high-performance, reliable, and versatile systems that are unlocking a wealth of new capabilities for forward-thinking mission designers. Such innovation requires a stable, proven, and user-friendly platform in order to maximize value creation in orbit. The NanoAvionics M6P nanosatellite bus has three standard performance configurations – Light, Mid and Max – that have been specifically designed to meet these criteria, while ensuring a significant amount of available payload space, and is equally well-suited for single-satellite missions or constellations.
The M6P’s onboard systems are flight-proven and are pre-configured, to simplify and speed up integration. This allows you to focus more time and effort on higher-level mission tasks, such as optimizing payload performance or testing new services.
By applying modern industrial processes and concepts we develop standardized modular satellite buses that are more reliable and cost-effective to integrate than custom-built alternatives. Our M6P multi-purpose systems also meet the requirements of a wide range of applications including:
All critical systems onboard, including the flight computer, payload controller, electrical power system (EPS), and communication systems, utilize radiation-tolerant components. The hardware layout maximizes payload volume while ensuring robust power functionality, reliability, and precise thermal control for sensitive payloads, such as measurement and sensing instruments.
The bus also has a decentralized data system that enables fast data rates and an optional high-impulse propulsion unit can also be included, so that mission objectives and timelines can be extended or adjusted if required.

Client name
OQ TechnologyLaunch date
2023 06 12Tiger-4 is expanding the world’s first and largest 5G Narrowband-IoT constellation in low Earth orbit (LEO). The 6U nanosatellite is the fourth satellite manufactured for OQ Technology by NanoAvionics.

Client name
DEWA (Dubai Electricity and Water Authority)Launch date
2023 04 15DEWA SAT-2 features a high-resolution camera (4.7 metres) that is used for Earth observation missions. The high-resolution camera provides continuous line-scan imaging in seven spectral bands from an approximately 500km orbit. The satellite is also equipped with Infrared equipment to measure greenhouse gases. DEWA uses nanosatellite technology to support its cloud computing network, thereby enhancing the digitization of energy and water networks. It’s a 2nd satellite NanoAvionics manufactured for DEWA.
Client name
GamaLaunch date
2023 01 03Gama, a French space start-up, has contracted NanoAvionics for a demonstration of Gama’s solar sails propulsion system in low Earth orbit. Under the mission agreement, NanoAvionics provided 6U nanosatellite bus, payload integration services, a satellite testing campaign, launch services and satellite operations. Gama “Alpha” is Europe‘s first solar sail mission and was launched aboard SpaceX Transporter-6.

Client name
FFI (Norway) TNO & NLR (The Netherlands)Launch date
2023 01 03“Birkeland” and “Huygens” are two 6U satellites built for FFI from Norway and NLR and TNO from The Netherlands. It is the first known two-satellite system to detect, classify, and accurately geolocate Radio Frequency signals, including navigation radars used on ships, by combining the measurement angle of arrival (AoA) and time difference of arrival (TDOA). Simultaneous detection of pulsed radio signals by both satellites flying in tandem enables accurate geolocation during all weather conditions.

Client name
Norwegian University of Science and TechnologyLaunch date
2022 01 13HYPSO-1 is a 6U nanosatellite built for the Norwegian University of Science and Technology (NTNU), to conduct ocean research. From its Sun-synchronous orbit, HYPSO-1 (HYPer-spectral Satellite for ocean Observation) is monitoring algal blooms and other aspects of ocean health in an autonomous synergy with robotic agents around the Norwegian coast. It is the first of the two satellites NanoAvionics is supplying to the program.

Client name
OQ TechnologyLaunch date
2021 06 29Tiger-2, a 6U nanosatellite, is the second mission for NanoAvionics with OQ Technology and the latest addition to OQ Technology’s growing low Earth orbit (LEO) constellation of nanosatellites. Their constellation intends to provide basic commercial IoT and M2M services, using 5G connectivity, to customers with a focus on Africa, Middle East, Asia, and Latin America. NanoAvionics was contracted to build, integrate and operate the nanosatellite for OQ Technology 5G IoT mission.

Client name
Aurora InsightLaunch date
2021 01 24 and 2021 04 28“Bravo” and “Charlie” are two 6U nanosatellites NanoAvionics that built, launched, and have been operating for Aurora Insight, a U.S. business analytics company for the wireless industry. Both satellites have been scanning the radio frequency (RF) environment from LEO and are a critical part of Aurora’s technology, which maps network activity around the world.
