Be part of the future with us!
Register now for our online product launch event on May 23rd.



The minimum order quantity for this subsystem is 20 pieces.
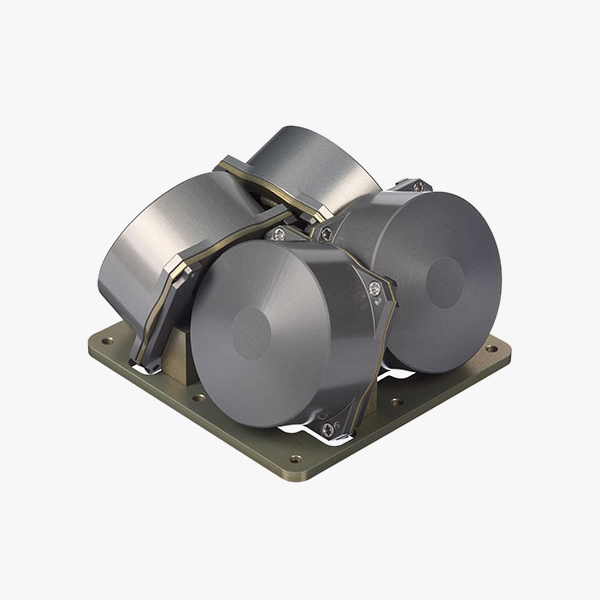
NanoAvionics has designed reaction/momentum wheels (RW) which can be ordered as separate components or integral 4 reaction wheels redundant 3-axis control system, enabling precision pointing of the small satellite.
Reaction wheels includes DC brushless motors assembled in sealed housing providing no particle emissions and preventing contamination of peripheral devices.


The minimum order quantity for this subsystem is 20 pieces.
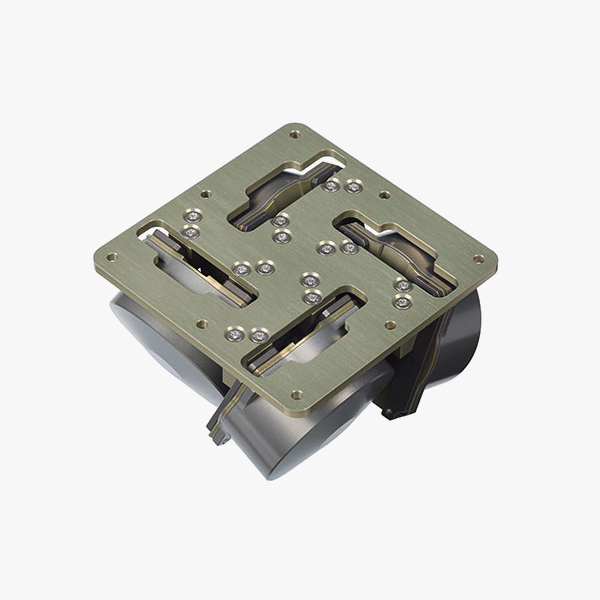
NanoAvionics has designed reaction/momentum wheels (RW) which can be ordered as separate components or integral 4 reaction wheels redundant 3-axis control system, enabling precision pointing of the small satellite.
Reaction wheels includes DC brushless motors assembled in sealed housing providing no particle emissions and preventing contamination of peripheral devices.
